本社にて遠隔制御システムの実証実験が行われました
当社本社(福岡県須恵町)にて、東京大学発のロボット開発ベンチャー企業である株式会社キビテク(本社:東京都品川区/以下、キビテク社)が開発中の高度自律型遠隔制御システム(以下、HATS)の実証実験が行われました。
実験は、本社にて実証実験中の株式会社匠(本社:福岡県福岡市)が開発した自走型オゾン発生空気清浄ロボット・タクミクリンに遠隔制御用の装置を搭載し、HATSのシステムと接続して、以下の手順で行われました。
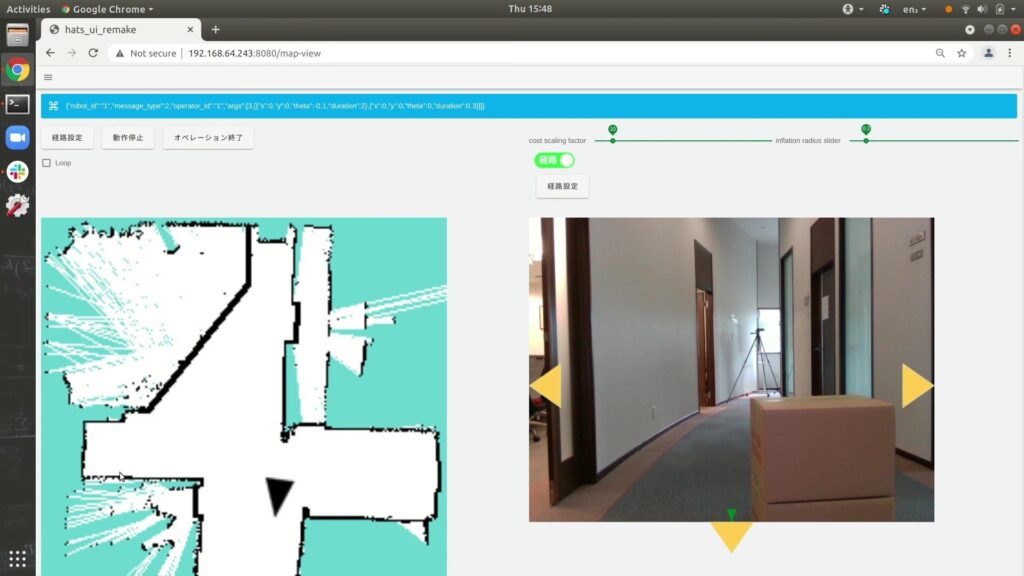
- 自律走行中のタクミクリンが経路上の障害物を検知し安全停止する
- HATSのシステムによってオペレーターに通知が送られる
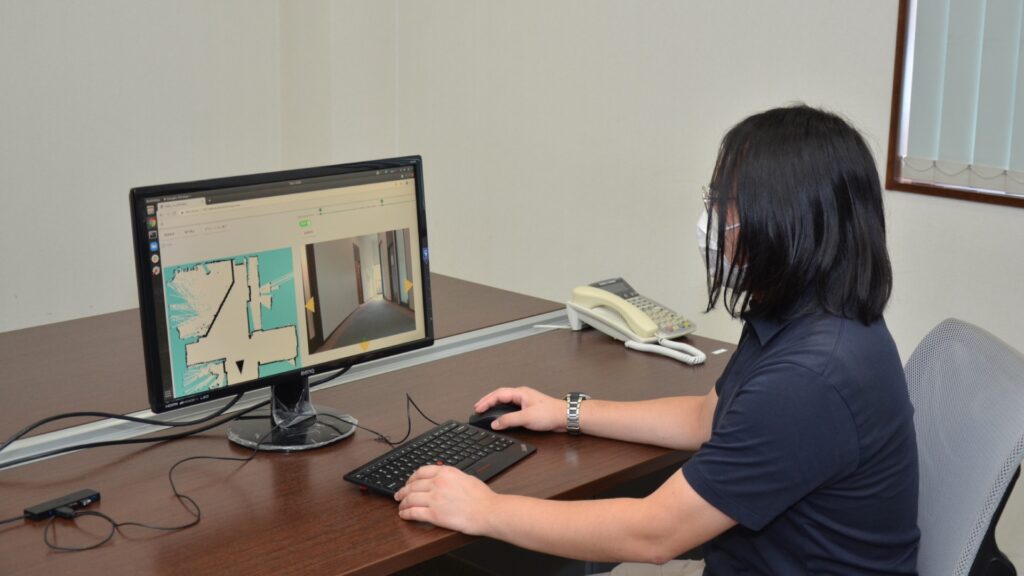
- オペレーターが遠隔操作で状況確認と復旧作業を行い、再度自律走行の状態に戻す
結果は成功で、停止状態にあるロボットを遠隔操作でスムーズに復旧させることができました。
キビテク社では、今後も様々な自律搬送ロボットにHATSのシステムを搭載し、実運用に向けた開発を行っていく予定です。